|
|||||||||||||||||||||||
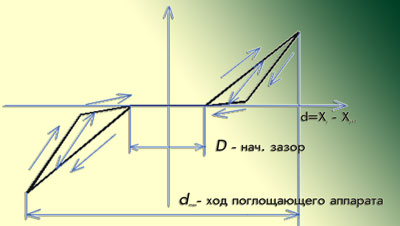
Повагонная тормозная модель поезда, достаточно точно отражающая физику происходящих динамических процессов (пневматическое торможение), получила дальнейшее развитие в разработках ВНИИЖТа и ДИИТа. Согласно современным представлениям об этой модели скорость распространения тормозной волны по составу практически постоянна и равна Vторм= 275 м/с. Кроме того, она несущественно зависит от вида и режима (груженый, средний , порожний) торможения, а ее разброс между поездами различной составности также незначителен. С момента Тнтi начинается рост давления в тормозных цилиндрах i-го вагона. Он происходит следующим образом: начальный скачок до 0,8 кгс/см2, а затем рост до некоторого установившегося давления Ру, которое является функцией режима торможения и величины снижения давления в тормозной магистрали DРм и описывается аналитически.
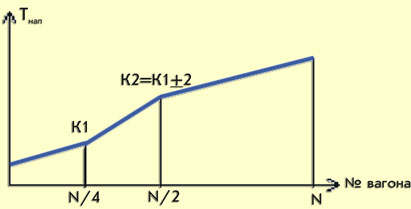
Значение времени наполнения тормозных цилиндров Тнапi i-го вагона зависит от вида торможения и имеет вид, представленный на рис. 2. Эта зависимость может быть легко аппроксимирована кусочно-линейной функцией. Действительная сила нажатия на тормозную колодку пропорциональна давлению в тормозном цилиндре. Касательная тормозная сила, приведенная к ободу колеса, вычисляется аналитически. Для режима отпуска считается, что волна распространяется по составу практически с постоянной скоростью и зависит от числа вагонов. В настоящей работе для расчета продольно-динамических усилий в составе принята именно эта модель, являющаяся одной из наиболее точно отражающих физику реально происходящих процессов в поезде. При ее реализации недопустимы никакие дополнительные или упрощающие по отношению к принятой физической модели предположения. При работе с АПК пользователь имеет возможность:
Темп управления движением поезда осуществляется в режиме задаваемого соотношения реального и текущего времени, т.е. можно выбирать наиболее приемлемую скорость отображения данных на дисплее. Это позволяет осуществить быстрый прогон ситуации при отсутствии изменения режима управления и в режиме близком к реальному времени и даже медленнее. Развитый интерфейс пользователя позволяет иметь полную информацию о процессах в составе как в ходе выполнения программы, так и по завершении ее работы. Движущийся курсор позволяет отслеживать ход выполнения расчетов, а в режиме просмотра осуществлять привязку к пути или реальному времени. Возможно редактирование отдельных параметров задания или управления.
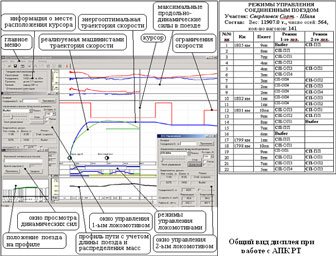
Примеры графического и текстового представления информации во время работы программы приведены на рис. 3. Программа предназначена для работы на персональных компьютерах класса IBM PC под управлением операционных систем Microsoft Windows 98, 2000, XP. Рекомендуемая конфигурация ЭВМ включает центральный процессор класса Intel Pentium II и выше, оперативную память 128 МВ и более, 17" монитор с разрешением не менее 1024х768 и 16-ти битным цветом. Для реализации возможности одновременного управления распределенными по составу локомотивами используется локальная вычислительная сеть (ЛВС) стандартной конфигурации. Каждый из обучаемых машинистов управляет локомотивом, используя отдельный компьютер, при этом ему доступна информация об управляющих действиях других машинистов в режиме реального времени. Выбор ЛВС обусловлен тем, что современные ЛВС широко распространены, обладают высокой скоростью передачи данных и позволяют работать с минимальными задержками по времени. На ведущем компьютере вводятся исходные данные, необходимые для работы, и выполняются все расчеты. Ведомые получают результаты расчетов по сети от ведущего и отображают их. В первую очередь выполняется расчет энергооптимальной траектории движения и продольно-динамических сил, действующих в составе. После завершения расчетов по команде с ведущего компьютера начинается моделирование поездки (управление поездом), после чего на каждом компьютере автоматически открывается окно управления своим локомотивом. С помощью специального встроенного в программу интерфейса машинист может менять позиции контроллера своего локомотива, управлять тормозами. Управление масштабом времени и возвратом назад может осуществляться только с ведущего компьютера. Помимо окна с интерфейсом управления локомотивом во время моделирования поездки все экземпляры программы отображают скоростную траекторию движения поезда, режимы управления каждого из локомотивов и максимальные по составу продольно-динамические квазистатические силы в поезде. При этом на экране всегда присутствует в качестве эталона аналогичная информация для энергооптимальной траектории. Кроме того, на ведущем компьютере в любой момент в процессе моделирования доступна информация о продольно-динамических силах во всех сцепах состава (график зависимости силы как от автосцепки для определенного интервала времени, так и от момента времени для всех автосцепок в составе, а также гистограмма распределения квазистатических продольных сил за время поездки). Ввод исходных данных может осуществляться как вручную, так и посредством быстрой загрузки из базы данных сохраненных наборов исходных данных программы. Вся справочная постоянная информация о локомотивах (тип, вес, длина, тяговые и тормозные характеристики), вагонах (вес, длина, число осей), участках (профиль и план пути, расположение километровых столбов и станций) хранится в базе данных программы и доступна пользователям. Изменение данной постоянной информации невозможно. Исходные данные и результаты расчетов сохраняются в базе данных для дальнейшего использования и анализа. Полученные режимы управления локомотивами при реализации энергооптимальной режимной карты и результаты расчета продольно-динамических процессов в составе могут быть представлены как в графическом, так и в текстовом виде с возможностью редактирования, а также сохранены на носителях для дальнейшего использования или выведены на печать. Описываемая программа была тщательно протестирована как по точности результатов, так и по затратам процессорного времени и памяти ЭВМ. При сравнении результатов расчетов с помощью данной программы и на основе аналитических решений проверялась точность отработки характеристики поглощающего аппарата автосцепок и зависимости значений продольных сил от времени. Результаты показали, что задаваемая относительная точность счета была обеспечена. В части тестовых расчетов для реального состава было получено достаточно хорошее совпадение с результатами расчетов на основе пакета MATLAB 5.2 (промышленный пакет для решения научных и инженерных задач фирмы MathWorks, США). Особенно тщательно тестировалась точность отработки характеристики поглощающего аппарата автосцепки. В части затрат процессорного времени тестирование показало, что расчет переходного процесса на ПЭВМ с процессором Intel 1200 (Pentium III) занимает 1/80 от реального времени длительности этого процесса. Результаты тестирования и численных экспериментов показали, что качество алгоритмов и его численной реализации обеспечило производительность примерно в 100 раз выше, чем в аналогичном пакете среды MATLAB 5.2. Такая производительность в сравнении со всемирно известным профессиональным программным продуктом была обеспечена исключительно за счет учета специфики задачи и тщательного низкоуровневого программирования. При этом обеспечена задаваемая относительная точность и общая стабильность работы программного комплекса. Программа многократно использовалась для численного моделирования при анализе случаев крушений, связанных с возникновением больших продольно-динамических сил, приводящих к стаскиванию, обрывам автосцепок, раскантовке рельсов и сдвигу рельсо-шпальной решетки. Результаты расчетов достаточно точно совпадали с числом и порядком вагонов в сходе. Кроме анализа случаев крушений были сопоставлены результаты расчетов с прямыми измерениями продольно-динамических сил в различных сечениях поезда в ходе опытных поездок на участках Рыбное - Орехово, Красноярск - Иркутск. Опытные данные получены с помощью используемой в в комплексном отделении тяги поездов и экономии топливно-энергитических ресурсов ВНИИЖТа системы дистанционного измерения продольно-динамических усилий в различных сечениях грузового поезда.
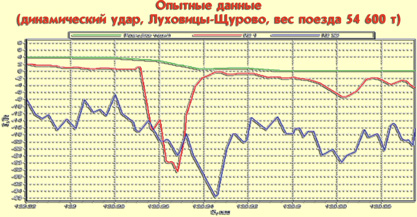
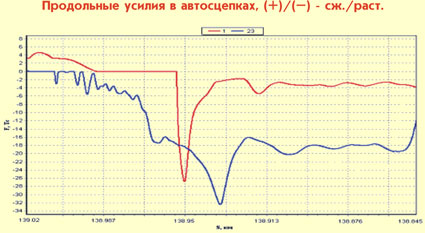
Так, на участке Рыбное - Орехово в качестве участка сравнения выбран 138 км 9 пк, на котором был зафиксирован динамический удар. Анализ режима управления поездом, характер профиля и плана пути, скорости поезда и силы тока показал, что динамический удар сжатия произошел вследствие перехода с тяги на выбег в сочетании с переломом профиля, обусловившим резкое снижение роста скорости локомотива с набеганием вагоном на голову поезда. Сопоставления опытных (рис.4) и расчетных (рис.5) данных показали их совпадение с приемлемой точностью как по характеру зависимостей анализируемых продольно-динамических сил от координаты пути, так и по их абсолютным значениям.
На период 2002 - 2004 гг. по Программе ресурсосбрежения программный комплекс для обучения машинистов энергосберегающим и безопасным (по продольной динамике) методам управления поездом внедрен в 71 депо, обслуживающих наиболее загруженные направления. В 2005 г., в связи с увеличением грузооборота и вводом в эксплуатацию поездов повышенной массы и длины, планируется внедрение версии ПК для составов с распределенной тягой.
Следует отметить, что разработчик на протяжении всего времени эксплуатации
комплекса обеспечивает всестороннюю поддержку пользователя: обучение работе с
АПК, проведение семинаров по наиболее эффективному его использованию,
корректировка в случае изменения базы данных, гарантийное обслуживание
оборудования, обновление версий программного обеспечения, консультации для
пользователей.
|
|||||||||||||||||||||||
|
|