|
|||||||||||||||||||||||||||
Регистратор параметров движения и автоведения пассажирских электровозов (РПДА-П) обеспечивает регистрацию 39 параметров движения и управления с записью на сменный носитель (картридж) информации, необходимой для реализации электронного маршрута машиниста. Он также позволяет записывать на картридж задание на поездку с автоматическим считыванием его в систему автоведения, что избавляет машиниста от ввода какой-либо информации перед поездкой. Система автоведения и регистратор облегчают труд машинистов и ремонтников и способствуют повышению производительности их труда, особенно в условиях постоянно увеличивающихся плеч обслуживания, позволяет экономно расходовать электроэнергию и вести ее регистрацию отдельно на тягу и отопление поезда. Повышается безопасность движения за счет автоматического исполнения скоростного режима движения по сигналам светофоров с учетом постоянных и временных ограничений скорости, а также за счет уменьшения утомляемости машиниста. Таким образом обеспечивается высокое качество вождения поездов независимо от квалификации машинистов. В настоящее время разработаны и внедрены следующие системы автоведения и регистраторы для электровозов пассажирского движения:
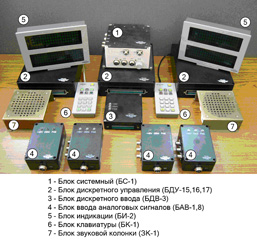
Аппаратные электронные средства системы автоведения для электровоза ЧС6 показаны на рис. 1, а регистратора параметров движения РПДА-П на рис. 2. Системы автоведения и регистраторы строятся на основе блоков комплекса автоматизированного управления и диагностирования КАУД, который представляет собой набор унифицированных блоков определенной функциональности со стандартизованными интерфейсом CAN 2.0 b и программным протоколом верхнего уровня CANOpen. В состав этого комплекса входят несколько блоков. Блок системный БС. Это центральный блок для автоведения. В распределенной CAN сети выполняет функции шлюза внутренней сети, к которой подключаются остальные блоки системы, и внешней для подключения САУТ/ЦМ и КЛУБ-У. В состав блока входят источник питания для обеспечения всех блоков стабилизированным питанием 48В, два процессорных модуля CPU686 с двумя CAN интерфейсами каждый (может устанавливаться один модуль) и мастер-модуль, реализующий сетевые функции. Блок индикации БИ алфавитно-цифровой (8х20 знакомест) с клавиатурой (19 клавиш) и звуковой колонкой. В составе комплекса КАУД имеется графический цветной дисплей с разрешением 640х480 пикселей. Блок регистрации БР с индикацией потребленной энергии. Предусмотрено сжатие информации, принимаемой по CAN шине, и запись на картридж, а также загрузка ПО и электронного маршрута машиниста с картриджа. Блок дискретного управления БДУ для управления контроллером и краном машиниста, приема и обработки дискретных сигналов. В состав блока входят модуль дискретного управления (12 ключей на токи до 20 А), модуль приема дискретных сигналов (24 сигнала, подключенных к выводам ключей) и модуль реле и защиты для восстановления штатной схемы электровоза (4 реле). Блок аналогового ввода БАВ, в который могут устанавливаться три модуля различных модификаций, служит для преобразования тока 4..20 мА в цифровой код (датчики давления) частотных сигналов ДПС и напряжения. Блок дискретного ввода для приема и преобразования в цифровой код 12 сигналов цепей управления электровоза. Блок измерения высоковольтный модульный БИВМ конфигурируется под конкретный электровоз. Измеряет токи в силовых цепях электровоза, напряжение в контактной сети и вычисляет затраченную электроэнергию. Может содержать до 8 измерительных модулей. Высоконадежный блок накопления информации (картридж) емкостью 64 Мбайт со скоростью обмена до 1 Мбит/с и временем стирания не более 1с. Системный блок БС обеспечивает единое питание всех блоков комплекса. Установленный в нем процессорный модуль обеспечивает слежение за всеми контролируемыми параметрами, реализацию алгоритмов автоведения и передачу в блок регистрации для записи на картридж отфильтрованной информации. Конкретная комплектация блоков ввода-вывода определяется типом тягового подвижного состава и набором дискретных и аналоговых сигналов, подлежащих регистрации. Устанавливается необходимое количество модулей БИВ требуемого типа в зависимости от количества измеряемых токов и напряжений. Прием и запись на картридж информации от приборов безопасности осуществляется по стандартизованному CAN интерфейсу. Эта информация поступает также в системный блок, процессор которого производит ее содержательную обработку. Речевая информация выдается машинисту через звуковую колонку. Для реализации электронного маршрута вся информация по нему, включая список предупреждений, записывается на АРМе в картридж, что исключает необходимость ввода какой-либо информации перед отправлением. Информация об исполнении расписания, нарушениях и расходе энергии автоматически записывается на картридж во время поездки.
В процессе разработки систем автоведения пассажирских электровозов возникла проблема автоматического управления тормозами электровоза и поезда. Пневматическое оборудование в виде пневмоприставки 206 для системы САУТ не обеспечивало отпуск тормозов со сверхзарядкой тормозной магистрали. Поэтому была разработана тормозная подсистема автоведения, показанная на рис. 3. Для дистанционного управления режимами торможения, перекрыши и отпуска была разработана новая приставка ПМ-07-03 на основе высоконадежных электромагнитных клапанов тип КЭО, которая устанавливается на кран машиниста 395. Реализация автоматического отпуска тормозов осуществляется совместно отпускным клапаном приставки и клапаном КЭО15, установленном на пневмопанели электровозов. Открытие этих клапанов обеспечивает проходное сечение, аналогичное 1-му положению крана машиниста 395. Для поездов с числом вагонов меньше 11 клапан КЭО 15 не применяется. Данное тормозное оборудование унифицировано и применяется на всех типах пассажирских и грузовых электровозов. Это фактически дистанционный кран машиниста, который имеет низкую стоимость, обеспечивает высокую надежность управления тормозами как в автоматическом, так и в ручном режиме. В отличие от зарубежных систем, которые обеспечивают лишь поддержание заданной машинистом скорости, отечественные системы автоведения в реальном времени сами рассчитывают и реализуют оптимальную скорость движения в зависимости от постоянно меняющейся поездной обстановки на маршруте с учетом постоянных и временных ограничений скорости, сигналов светофоров, тяговых и тормозных характеристик конкретного электровоза и поезда, условий проезда определенных участков и напольных устройств, а также множества других факторов. В целом, как показали патентные исследования, данные системы не имеют аналогов в мире. В основе энергооптимального вождения поездов лежат алгоритмы быстрой оптимизации движения с учетом вышеперечисленных факторов, разработанные учеными ВНИИЖТа под руководством доктора технических наук Л.А. Мугинштейна. Данные алгоритмы опробованы при разработке режимных карт вождения поездов. В отличие от статичных режимных карт, которые рассчитываются перед поездкой, в системах автоведения реализован постоянный перерасчет траектории движения при каждом изменении условий. Следует отметить, что в отличие от моторвагонного подвижного состава, где реализуется практически старт-стопное движение, автоведение пассажирских поездов должно обеспечивать высокую точность исполнения расписания в условиях постоянно изменяющейся поездной обстановки на больших расстояниях. При этом необходимо оптимизировать траекторию движения на десятки и сотни километров вперед. Критериями, исходя из которых разрабатывалась программа автоведения пассажирских поездов, были: соблюдение графика движения с точностью 1 мин (для скоростного движения – 30 с), минимизация потребленной энергии на тягу, соблюдение ПТЭ и щадящие режимы управления тягой и тормозами, в частности минимизация числа переключений контроллера. Основной особенностью системы автоведения пассажирских электровозов является расчет оптимальной траектории движения, соответствующей заданному машинистом режиму исполнения расписания непосредственно в бортовом компьютере в реальном времени, что позволяет минимизировать потребленную энергию на тягу при исполнении графика движения. Кроме того, программа адаптируется к характеристикам конкретных электровоза и поезда как по тяге, так и по тормозам, что обеспечивает более высокую точность управления во всех режимах движения поезда. Система позволяет автоматизировать проверки ее и электровоза перед поездкой, что существенно уменьшает время готовности, и автоматизировать подготовку к поездке за счет предварительной записи на картридж (на АРМе в депо) задания на поездку, включая список предупреждений, и автоматическое его считывание перед отправлением. Во время движения обеспечивается оперативное тестирование аппаратуры системы автоведения и электровоза с выдачей речевого сообщения машинисту в случае обнаружения неисправности, что повышает безопасность движения.
Форма представления информации на графическом дисплее системы автоведения показана на рис 4. На экран выводится информация о текущем времени, фактической скорости поезда, выбранной станции исполнения расписания, времени прибытия на эту станцию и оставшемся времени хода до этой станции, отклонении от графика движения, текущем ограничении скорости и расстоянии до конца этого ограничения, о следующем препятствии, требующем снижения текущей скорости, и расстоянии до этого препятствия, о сигнале очередного светофора и расстоянии до него, о расстоянии до конца текущего перегона и название этого перегона, текущая координата в км и пикетах, текущая позиция ГП и ОП и запрашиваемая позиция, основной и вспомогательный тормоз, заданные для системы автоведения. Представляется также информация о рекомендуемой скорости для поезда, токах в тяге или давлений в УР, ТЦ и ТМ в других режимах движения, состоянии и режимах работы УСАВПП, КЛУБ-У и САУТ-ЦМ. Кроме того, система выдает речевую информацию о превышении текущего ограничения скорости (в режиме ручного управления), подъезде к месту ограничения скорости с фактической скоростью, превышающей скорость ограничения, о запрещающем сигнале светофора, о приближении к переезду, воздушному промежутку, УКСПС и другим объектам, о неисправности аппаратуры. Система позволяет рассчитывать параметры движения и необходимые управляющие воздействия при определении скорости ведения поезда (расчетной скорости), обеспечивающей выполнение графика движения. При этом используются данные, полученные в результате расчета траектории движения поезда (зависимости скорости движения от координаты) с учетом реального отклонения от заданного графика движения и наличия временных ограничений скорости на участке безостановочного движения. Автоматически выбирается режим движения: разгон, поддержание скорости тягой, выбег, поддержание скорости торможением или торможение. Режим движения выбирается исходя из фактической и расчетной скорости с учетом профиля, ограничений скорости (постоянных, временных и обусловленных запрещающими сигналами светофора), остановочных станций и других железнодорожных объектов. Ведется расчет управляющих воздействий, обеспечивающих необходимый режим движения: позиции контроллера и ослабления поля, типа используемых тормозов (ПТ, ЭПТ, ЭДТ, локомотивный тормоз) и необходимого давления в тормозных цилиндрах. При расчете позиции учитывается вес поезда, фактическая и расчетная скорости поезда, кривизна пути, средний уклон и изломы профиля на ближайшем участке движения (от 100 м до 5 км, в зависимости от изломов профиля), необходимость минимизации числа переключений контроллера. При реализации требуемого режима движения (выполнении управляющих воздействий) предусмотрен плавный разгон поезда при трогании с места и выключение тяги на малых скоростях, контроль тока при наборе позиций по введенной уставке, контроль давлений в тормозных магистралях и цилиндрах при торможении и отпуске. Система имеет интерфейс, обеспечивающий машинисту широкие возможности корректировать параметры движения поезда, в частности, выбирать режим исполнения расписания в случае опоздания, устанавливать ускорения при разгоне и торможении, оперативно ограничивать скорость (для немедленного исполнения это делается путем нажатия одной клавиши), ограничивать максимальную ходовую позицию и регулировать уставку тока, регулировать коридоры поддержания скорости между ограничением и расчетной скоростью. Машинист может также разрешать или запрещать выполнять автоматическое торможение, выбирать основной и вспомогательный тормоз и регулировать режим торможения, корректировать координату. При работе в режиме управления поездом предусмотрено немедленное отключение режима автоуправления при вмешательстве машиниста посредством манипуляций ходовым контроллером, краном машиниста, задатчиком тормозной силы ЭДТ или отключением выходных цепей. Переход в режим подсказки сопровождается выдачей соответствующего речевого сообщения и индикацией на экране. Система передает параметры автоведения в РПДА-П каждую секунду и принимает от него по запросу значения токов, напряжения и давления. Система реализует как ручную, так и автоматическую коррекцию текущей координаты. В последнем случае она принимает от РПДА-П сигнал от устройства коррекции координаты при прохождении границы блок-участка и устанавливает в качестве текущей координату соответствующего светофора из базы данных. Автоматическая коррекция координаты производится также при старте из тупика, когда она зависит от числа вагонов в поезде. Системы автоведения пассажирских поездов и регистраторы существенно облегчают труд машиниста, что подтверждается проведенными ВНИИЖГом исследованиями. В частности, установлено, что применение автоведения позволяет продлить устойчивый уровень работоспособности в среднем на 2-3 ч и уменьшить загруженность машиниста. За счет энергооптимальных режимов движения, которые в системах автоведения рассчитываются в реальном масштабе времени непосредственно на локомотиве, экономится электроэнергия. Как показывают данные результатов обработки картриджей по реальным поездкам, экономия электроэнергии находится на уровне 5-10%. Значительно повышается безопасность движения за счет точного исполнения скоростного режима как по сигналам светофора, так и по ограничениям скорости, включая временные. Следует отметить, что система автоведения является единственным устройством на борту электровоза, которое информирует машиниста о временных ограничениях скорости, а в режиме автоведения их автоматически и отрабатывает. Качество вождения поездов в режиме автоведения находится на высоком уровне, независимо от квалификации машинистов. При этом во время поездки проходит обучение машинистов энергооптимальному вождению поездов, так как при автоведении разброс удельного расхода на тягу в 2 раза меньше, чем при ручном управлении. В заключение следует отметить, что созданные ЗАО «ОЦВ» системы автоведения и
регистраторы для электровозов пассажирского движения, а также технология их
эксплуатации являются уникальными и не имеют аналогов в мировой практике, о чем
свидетельствуют патенты, полученные на РПДА, систему автоведения пассажирского
поезда и тормозную подсистему электровозов.
|
|||||||||||||||||||||||||||
|
|